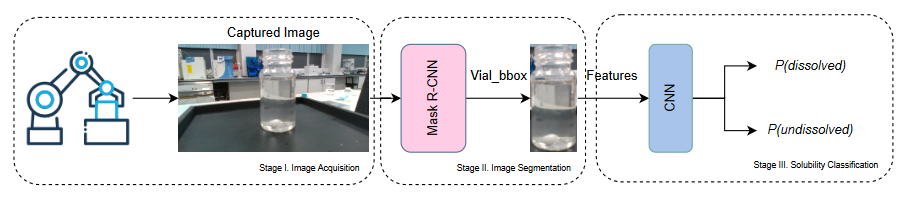
SOLIS (Autonomous solubility screening using deep neural networks)
SOLIS represents a deep learning-based, visual recognition method for non-invasive solubility screening which is capable of determining if a solid sample added to a solvent has dissolved completely. Inspired by how human chemists visually inspect their samples, our proposed method leverages state-of-the-art methods for image segmentation and convolutional neural networks for image classification and is deployed in real-world laboratory settings.
ARCHEMIST (Autonomous robotic chemistry system architecture)
ARChemist was developed to standardise material discovery workflows and integrate robotic platforms with lab instruments. This novel architecture is modular, and reconfigurable and allows for easy integration of heterogeneous robots and lab instruments. It streamlines the process of automating chemistry workflows by granting the scientist the possibility to easily design and execute their experiments using intuitive chemical recipes which the system takes as input and consequently executes them.
POWDER-BOT (Autonomous biomimetic solid dispensing using a dual-arm robotic manipulator)
POWDER-BOT is a novel automated solid dispensing system that utilises a highly dexterous dual-arm robotic manipulator capable of handling milligrams to grams of solids. It mimics the technique scientists use for solid dispensing with a spatula and analytical balance. When compared to other solid dispensing platforms available on the market, the system has demonstrated comparable accuracy and enhanced versatility in dispensing a diverse array of solid materials.
VISCO-BOT (Go with the flow: deep learning methods for autonomous viscosity estimations)
VISCO-BOT is a novel, end-to-end and non-invasive viscosity measurement method where a dual-armed collaborative robot manipulates liquid samples and collects video data of fluid motion. Our proposed method relies on three-dimensional convolutional neural networks (3D-CNN) to estimate the viscosity reading for different samples. Our robotic system also clearly outperformed a panel of human participants in identifying different samples based on visual inspection.
PXRD-BOT (Powder-Bot: A modular autonomous multi-robot workflow for powder X-ray diffraction)
PXRD workflow combines mobile and stationary robots that work together to prepare samples and subsequently collect their PXRD data. A dextrous dual-arm robot grinds and prepares solid crystalline samples for powder X-ray diffraction, while a mobile robot handles the transportation of samples between evaporation, grinding, and data collection stations. This workflow is developed using the ARChemist system architecture.
Back to: Cooper Group